Two things you can be sure of when doing research involving lakes:
- Many lakes are difficult to access, with no boat ramps, no nearby car parking, and often poor, narrow, or even non-existent tracks.
- Many lakes are hypersaline, or full of blue green algae, or just generally ‘yucky’, so you often want to avoid regular contact with the lake water.
Small inflatables are often used for tasks like accessing sediment traps, where all that is required is to get a couple of people into the middle of a lake. However, some tasks are not ideal for these types of craft. In particular, mapping tasks may require researchers to cover a lot of ground. Craft used for these tasks also benefit from hard-points for attaching equipment.
My approach was to adapt a pedal powered kayak (Native Watercraft Mariner 12.5) for lake mapping. These kayaks are designed for fishing, and are typically big, stable platforms. It has a catamaran hull, and you can stand up, or move around on the kayak safely. It is self draining, and you can climb back on board over the stern if needed. There are multiple hard-points for attaching equipment.

This kayak uses a Propel drive, with a pedal driven propeller in the centre of the craft. In shallow water, or water with lots of weeds the kayak can be paddled with the Propel drive raised. Once the water is deep enough for sounding (around 40cm), then the drive can be lowered, leaving hands free for manual sounding, instrument use, or playing Nintendo (just kidding :D). A lever to control the rudder is mounted on the port (left) side.
Attached to the hard-point by the seat is an accessory plate, holding a Lowrance HDS-5 echo sounder, featuring GPS, 200/50khz sounding and the capability to log to an SD card. The transducer for the echo sounder is mounted on an aluminium strut attached to the same accessory plate. The strut is friction clamped with a big wing screw, so the strut and transducer can rotate up and back if it hits an obstruction. The transducer usually sits 20cm below the water surface. The top of the strut is attached to a 3D printed handle with a mark to show when the strut is correctly aligned. Likewise, the transducer sits within a 3D printed surround to ensure that it can’t be rotated out of position if it hits an obstruction. If you need to push through reeds then either the transducer strut, or the entire echo sounder accessory plate can be removed.

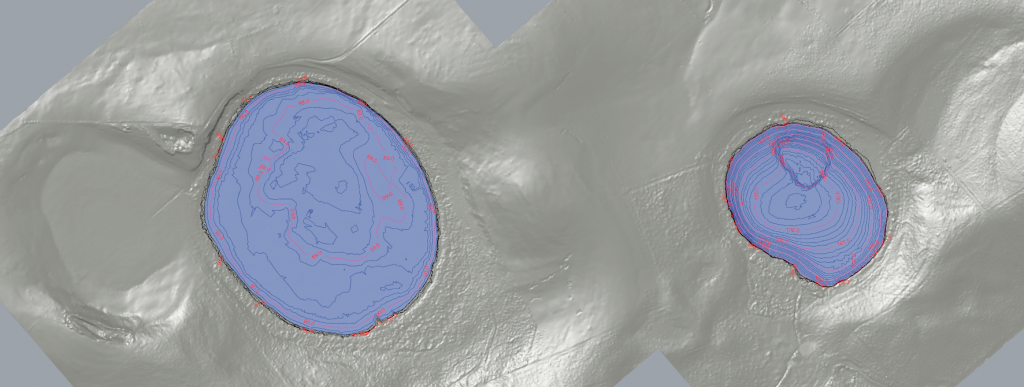
Mounted alongside the accessory plate is a bracket to hold a small survey pogo, for either a GPS antenna, or a prism (for a total station). For many lakes, survey grade positioning data may not be necessary, but on some occasions it is essential. A recently surveyed lake was in the bottom of a deep crater, with very poor sky views. Even with survey grade GPS, there were still positional errors of ±0.5m in the autologged points. If a handheld GPS was used, it’s likely that errors of ~5 to 20m would occur, which would ruin everyone’s day. Sonar logs from the Lowrance are linked to positional information through time syncing, so there is a lot of flexibility in the choice of instrument used for position data.
Behind the seat is space for the 12V battery to power the sounder, and an RTK GPS system. A tape and lead weight for manual sounding can fit beneath the seat.

An interesting feature of this kayak is the huge rear deck. It is designed as a spot to put cooler boxes for fishing, but one interesting possibility for lake research is the possibility of mounting a GPR (ground penetrating radar) on the back of the kayak. It is uncertain about how much the air gap in the hull under the GPR would attenuate the GPR signal, but it would make for a very nimble sediment mapping system.
Covering a lot of ground is easy with this kayak. With a relaxed pedalling speed it cruises at around 3 knots. In half a day it’s quite easy to cover 15-20km, which is usually enough distance to give a nicely detailed map of a lake of around 500 – 1000 m across. The ability to pedal backwards and stop or reverse the kayak also makes it easy to do manual sounding.